Overall Robot Design
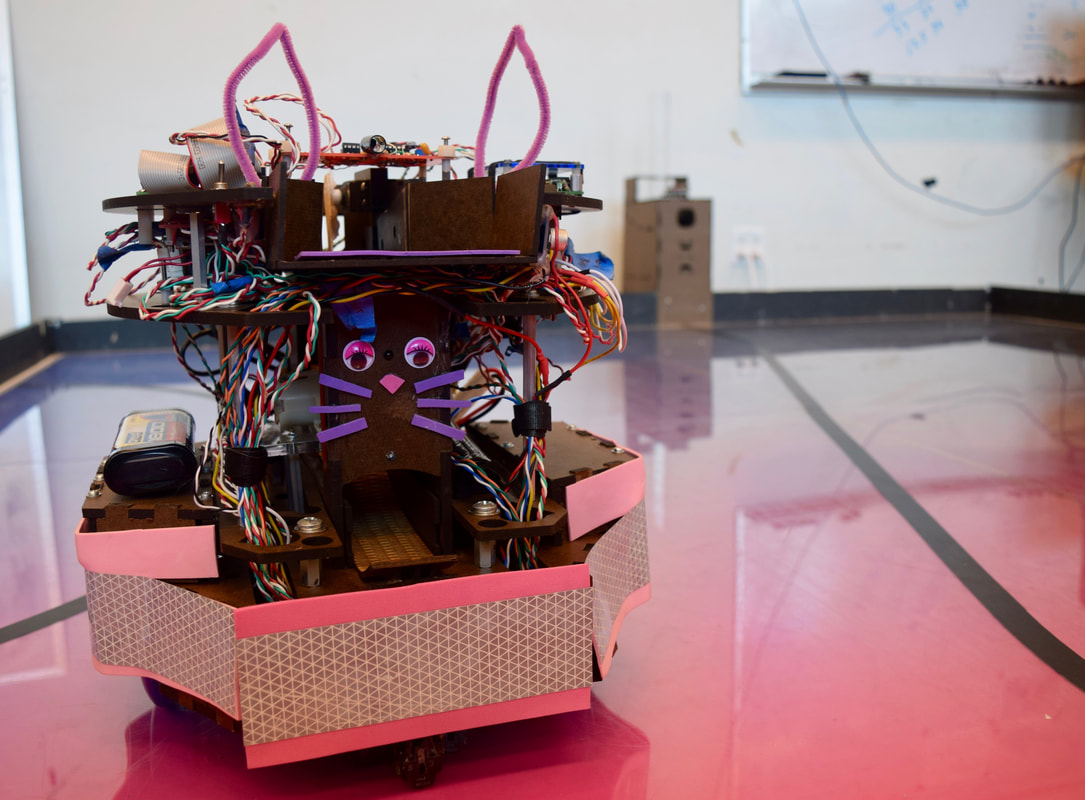
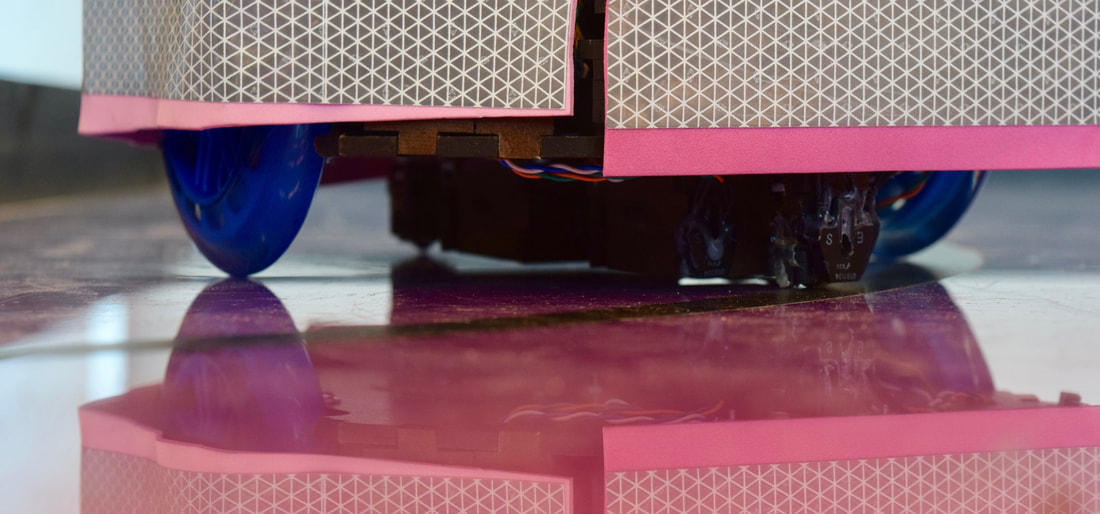
The majority of the robot is made of press-fit laser cut Duron (both 1/4" and 1/8"). There is a 2 inch wide bumper around the perimeter of the robot comprised of both thin crafting foam and reflective tape. In order to complete the Rabbit theme, pipe cleaners were used to form ears and foam and googley eyes were added to create a face.
|
|
CAD Model
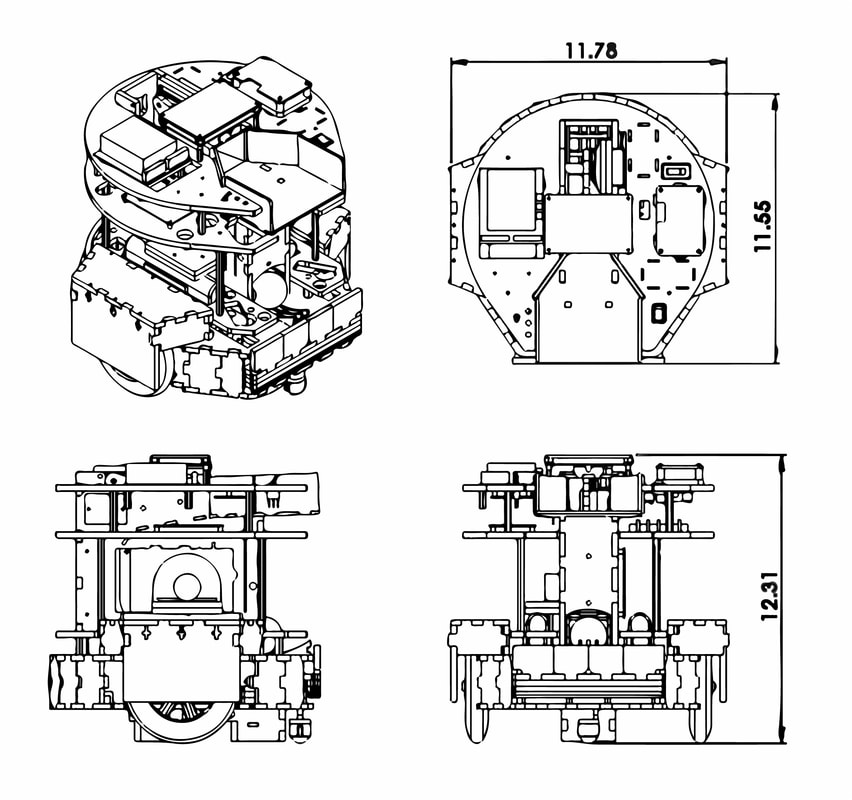
Please note that all dimensions are in inches.
Drivetrain
|
|
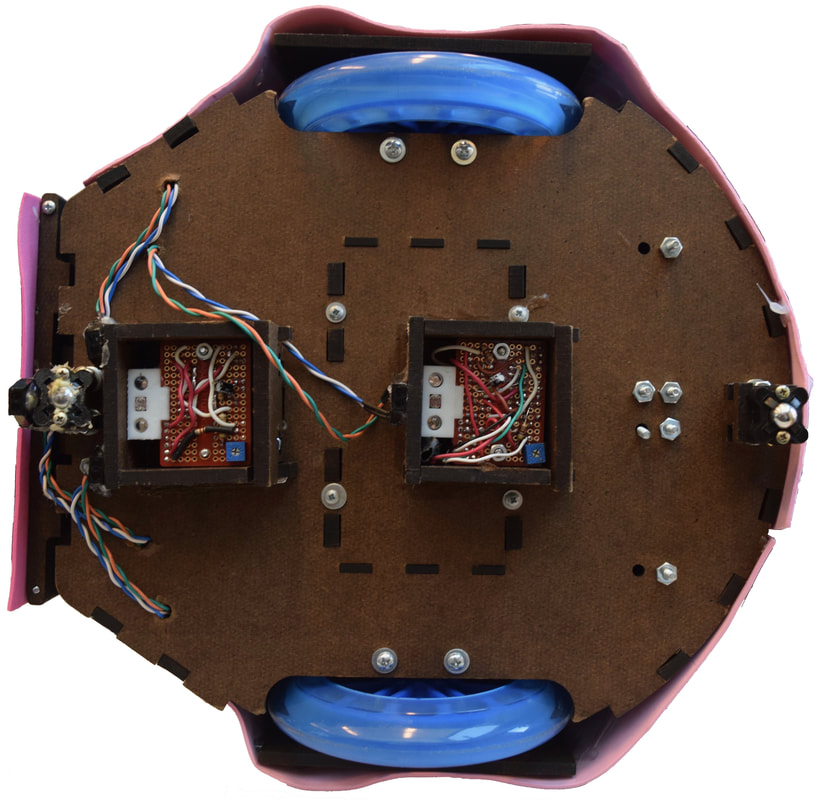
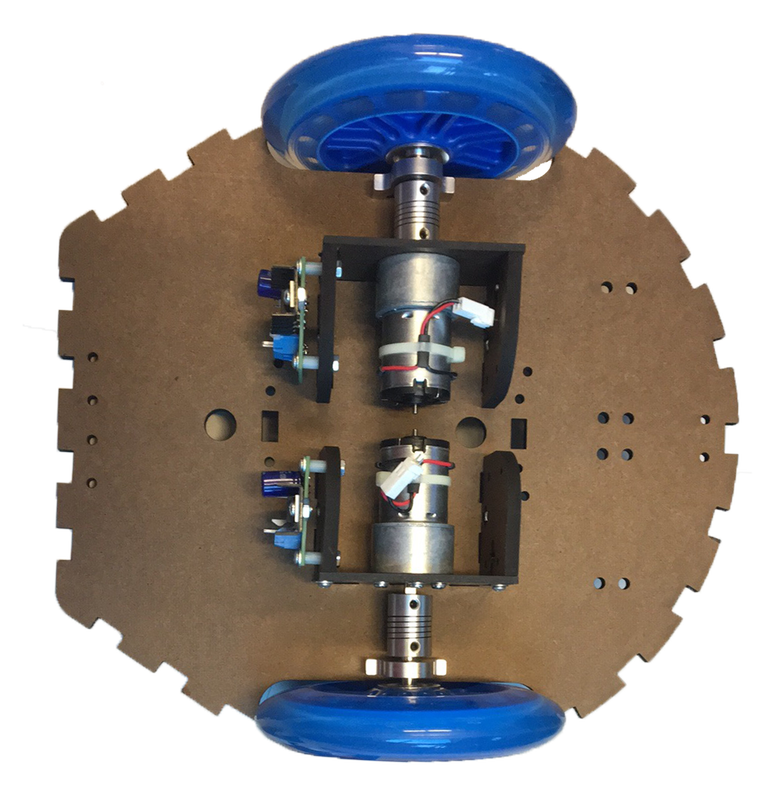
Two skate wheels were used for the motion of the robot. The shafts mounted through a pillow block and were attached to the motors via a flexible shaft coupler. These set screws were secured using Loctite.
Shooter
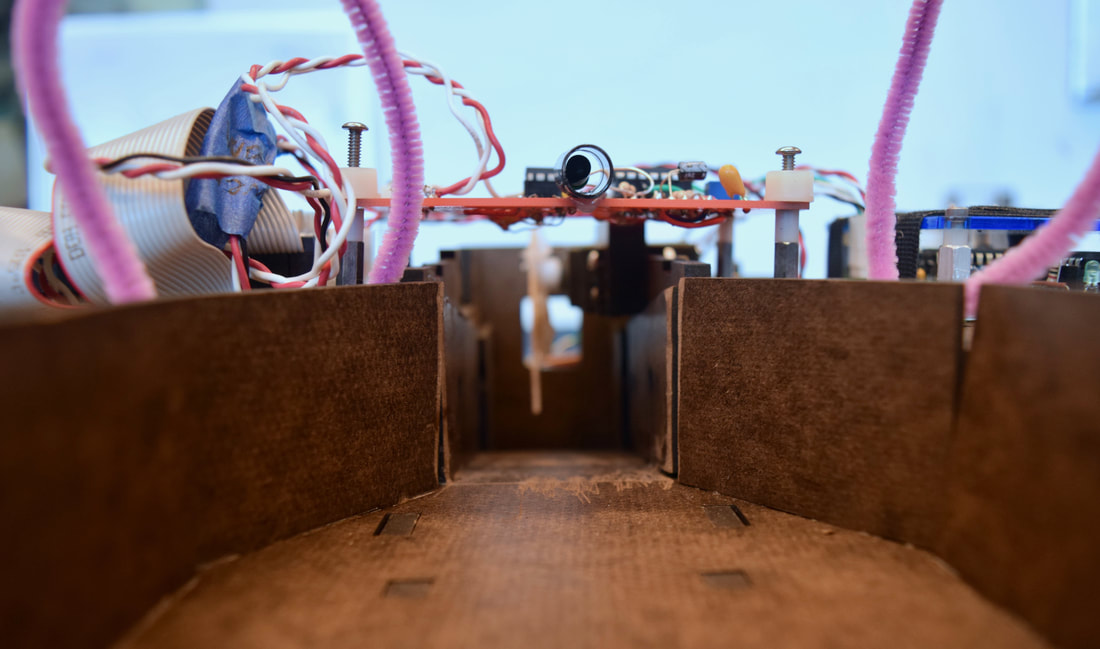
The ball enters from the reload station to an inclined ramp that slowly narrows to the ball's diameter. At the end of the ramp, it is stopped by a servo arm (that is used to release balls down to the flywheel). There is also a beam break set up right before the servo in order to determine if the robot currently has a ball.
A completely encased flywheel was modified to fit inside of our shooter (by removing part of the plastic case that was coming into contact with the ball. We use 1/8" wood laser cut with a living-hinge pattern to create a steeply inclined ramp. When the robot is ready to shoot, the servo will turn, releasing a ball, sending it down the ramp into contact with an pre-warmed flywheel. This then compresses the ball slightly and passes it through to the other side created an arc-ed trajectory into the goal.
|
|
Bumper
|
In order to respond to hitting the walls of the arena (or another robot), we created a bumper that transfers any hit along the front of the robot to a limit switch.
|
|
Sensors
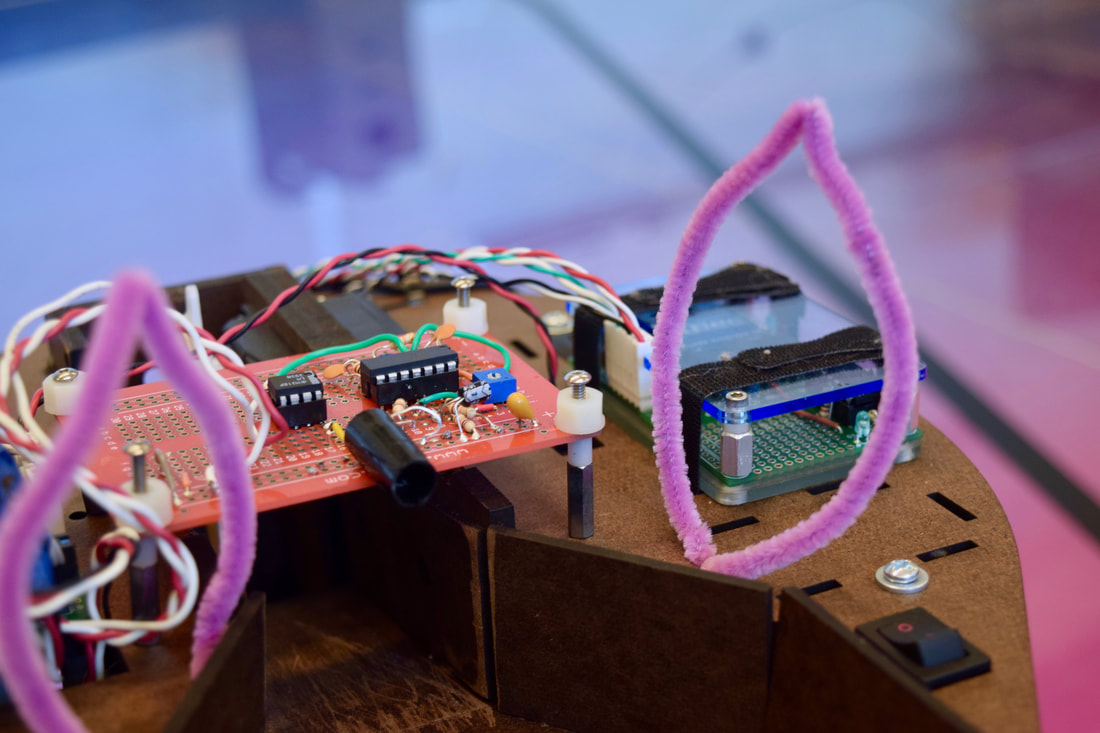
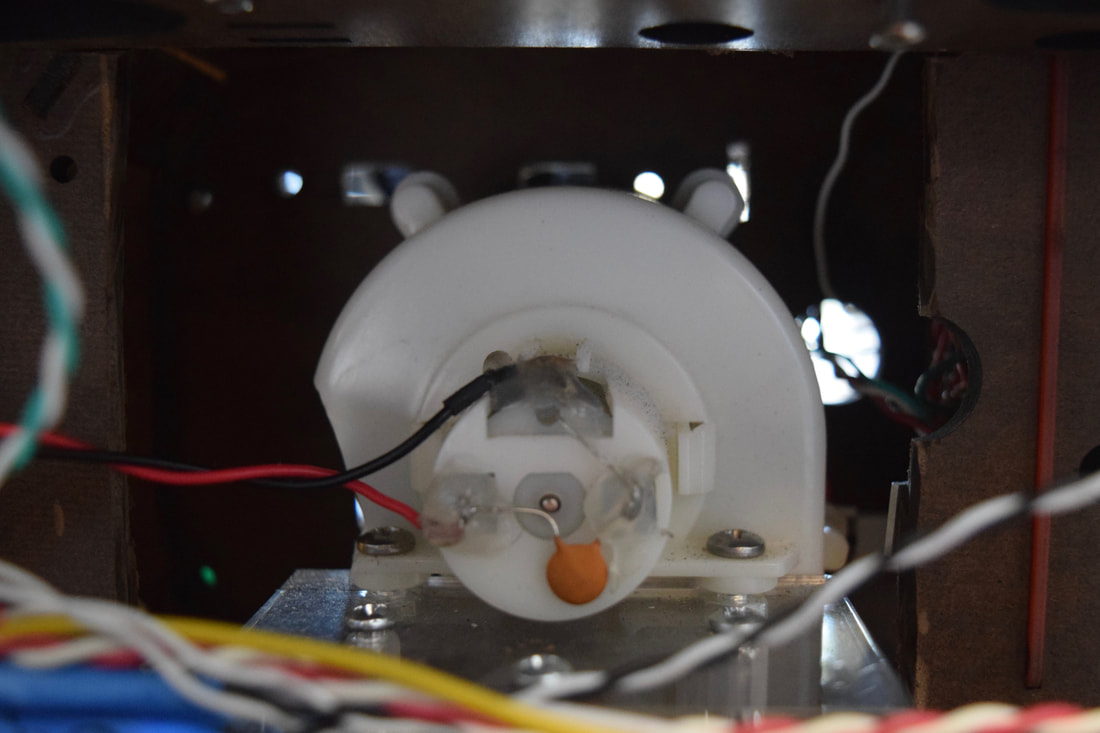
IR Beacon circuit mounted at the top of the robot next to the REF. A pen cap was used to shade and direct the sensor.
The tape sensors were mounted to the perimeter of the original color sensing boxes as well as the front of the ball castor.
